
| Funding period: | May 15, 2019 to Dec. 31, 2021 |
| Agency: | SAB |
| Further details: | https://sniffbot.inf.tu-dresden.de/ |
We acknowledge funding by the SAB project "Sniffing dangerous gases with immersive robots" (SNIFFBOT, grant agreement ID: 100369691)
SNIFFBOT - SNIFFING DANGEROUS GASES WITH IMMERSIVE ROBOTS
Motivation
In environments where hazardous gases could be present, the use of people should be prevented as far as possible. Such situations, which are life-threatening to humans, occur not only in chemical production plants, but also in the event of accidents, catastrophes, and, of course, in the repair of war damage. In order to adequately protect people from entering such dangerous environments, they should be explored by autonomous vehicles. If hazardous gases are detected, the vehicles should be able to detect, seal or completely eliminate the gas source(s).
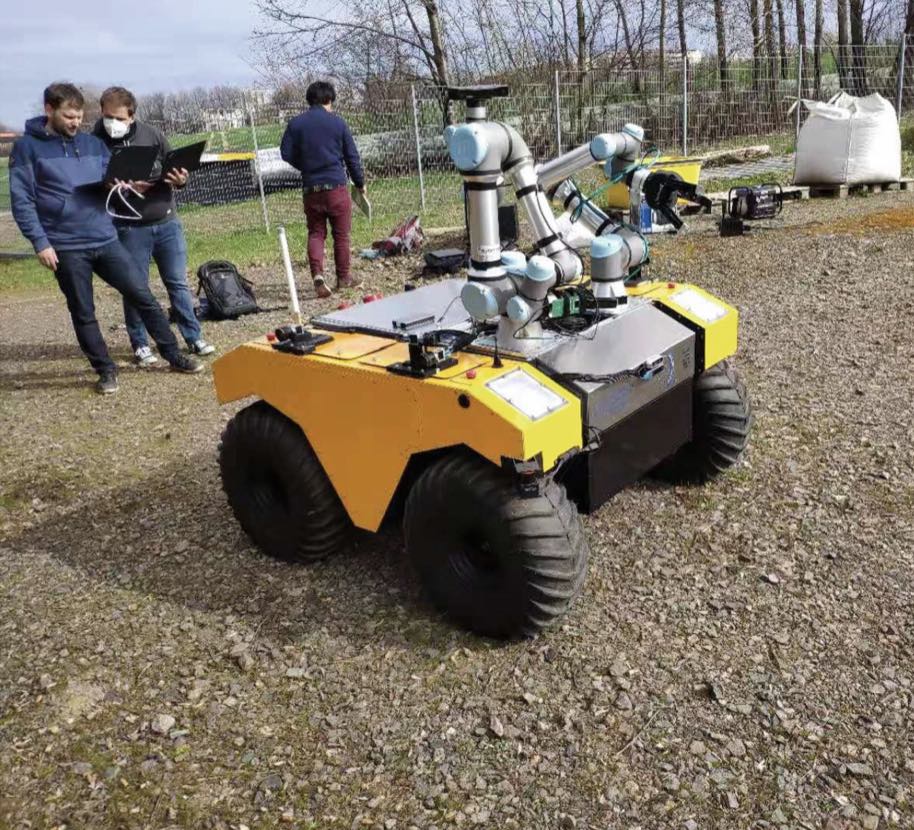
Wherever there are dangerous gases, people should stay away. In the future, robots that can sniff out gases and eliminate the danger will be used in accidents, disasters or to repair war damage. In SNIFFBOT, scientists from seven professorships are developing methods and technologies for the use of gas-sniffing robots in dangerous environments. The so-called sniff bots can be operated remotely and should make the use and endangerment of humans unnecessary. To this end, both drones and driving robots are equipped with our bio- and micro-sensors. If the sniff-bot finds toxic gas, a human can connect to the robot from a safe distance and control it, inspect the area, and ideally seal or remove the source of the toxic gas.
Overall objective of the project
The goal of the SNIFFBOT project is to develop methods and technologies for gas sniffing robots (“sniff-bots”). Sniff-bots are semi-autonomous, remote-controlled robots that can detect toxic gases and allow the remote operator to immerse himself in the robot’s environment and eliminate the dangerous sources of gas. To this end, drones and driving robots are to be equipped with modern bio- and micro-sensors to enable them to move around in dangerous regions and carry out appropriate work. For the necessary communication, the robots and drones used will form a dynamic mesh network to enable the bidirectional transmission of commands and data, thus allowing the swarm to act autonomously.
If a sniffbot finds toxic gas, a human should “immerse” the robot to inspect the area and, if possible, seal or remove the source of the toxic gas remotely. The system supports different types of drones and sensors and offers experts different immersive views through and onto the swarm. For this purpose, three types of interactions are planned in the project: the robots with the physical environment, the robots with each other or with the drones, and the robots with humans, i.e. remote controllers or groups in the dangerous situation. The views are augmented by task-related simulations and updates from integrated models of the environment and the situation and thus support contextualization, integration, and evaluation of the situation and the options for action
At the same time, the goal must be to develop an adaptive and self-organizing software for sniff-bots, because completely different tasks are required for different application scenarios. The project, therefore, combines tasks from sensor technology with robotic immersion and software technology for application-specific robot tasks.
The following goals are explicitly addressed by the SNIFFBOT project:



| Funding period: | May 15, 2019 to Dec. 31, 2021 |
| Agency: | SAB |
| Further details: | https://sniffbot.inf.tu-dresden.de/ |
We acknowledge funding by the SAB project "Sniffing dangerous gases with immersive robots" (SNIFFBOT, grant agreement ID: 100369691)
SNIFFBOT - SNIFFING DANGEROUS GASES WITH IMMERSIVE ROBOTS
Motivation
In environments where hazardous gases could be present, the use of people should be prevented as far as possible. Such situations, which are life-threatening to humans, occur not only in chemical production plants, but also in the event of accidents, catastrophes, and, of course, in the repair of war damage. In order to adequately protect people from entering such dangerous environments, they should be explored by autonomous vehicles. If hazardous gases are detected, the vehicles should be able to detect, seal or completely eliminate the gas source(s).
Wherever there are dangerous gases, people should stay away. In the future, robots that can sniff out gases and eliminate the danger will be used in accidents, disasters or to repair war damage. In SNIFFBOT, scientists from seven professorships are developing methods and technologies for the use of gas-sniffing robots in dangerous environments. The so-called sniff bots can be operated remotely and should make the use and endangerment of humans unnecessary. To this end, both drones and driving robots are equipped with our bio- and micro-sensors. If the sniff-bot finds toxic gas, a human can connect to the robot from a safe distance and control it, inspect the area, and ideally seal or remove the source of the toxic gas.
Overall objective of the project
The goal of the SNIFFBOT project is to develop methods and technologies for gas sniffing robots (“sniff-bots”). Sniff-bots are semi-autonomous, remote-controlled robots that can detect toxic gases and allow the remote operator to immerse himself in the robot’s environment and eliminate the dangerous sources of gas. To this end, drones and driving robots are to be equipped with modern bio- and micro-sensors to enable them to move around in dangerous regions and carry out appropriate work. For the necessary communication, the robots and drones used will form a dynamic mesh network to enable the bidirectional transmission of commands and data, thus allowing the swarm to act autonomously.
If a sniffbot finds toxic gas, a human should “immerse” the robot to inspect the area and, if possible, seal or remove the source of the toxic gas remotely. The system supports different types of drones and sensors and offers experts different immersive views through and onto the swarm. For this purpose, three types of interactions are planned in the project: the robots with the physical environment, the robots with each other or with the drones, and the robots with humans, i.e. remote controllers or groups in the dangerous situation. The views are augmented by task-related simulations and updates from integrated models of the environment and the situation and thus support contextualization, integration, and evaluation of the situation and the options for action
At the same time, the goal must be to develop an adaptive and self-organizing software for sniff-bots, because completely different tasks are required for different application scenarios. The project, therefore, combines tasks from sensor technology with robotic immersion and software technology for application-specific robot tasks.
The following goals are explicitly addressed by the SNIFFBOT project: